【ロボット手術の研究について】―Dr松﨑のブログ
2020年08月18日(火)
月曜日担当の松﨑です。
まだまだ暑い日が続いており熱中症対策もしっかりしないといけないですね。
先週、川崎重工業とシスメックスが共同出資している兵庫県の医療用ロボットメーカー、メディカロイドが手術支援ロボットを販売するニュースがあり、日本の技術の結晶がついにと医療業界でも期待が高まっています。
手術支援ロボットに関連して、私が留学していた頃の研究が最近発表されましたのでお話ししたいと思います。
カリフォルニア大学サンディエゴ校で変形性関節症用のロボット装具の開発をしたいと飛び込んだエンジニアのラボ、UCSD Advanced Robotics And Controls Labでの手術支援ロボット“ダ・ヴィンチ(da Vinci Surgical System)”を使用した研究内容を紹介致します。
論文:Compensatory motion scaling for time-delayed robotic surgery. Orosco RK, Lurie B, Matsuzaki T, et al. Surg Endosc. 2020 Jun 8. doi: 10.1007/s00464-020-07681-7.
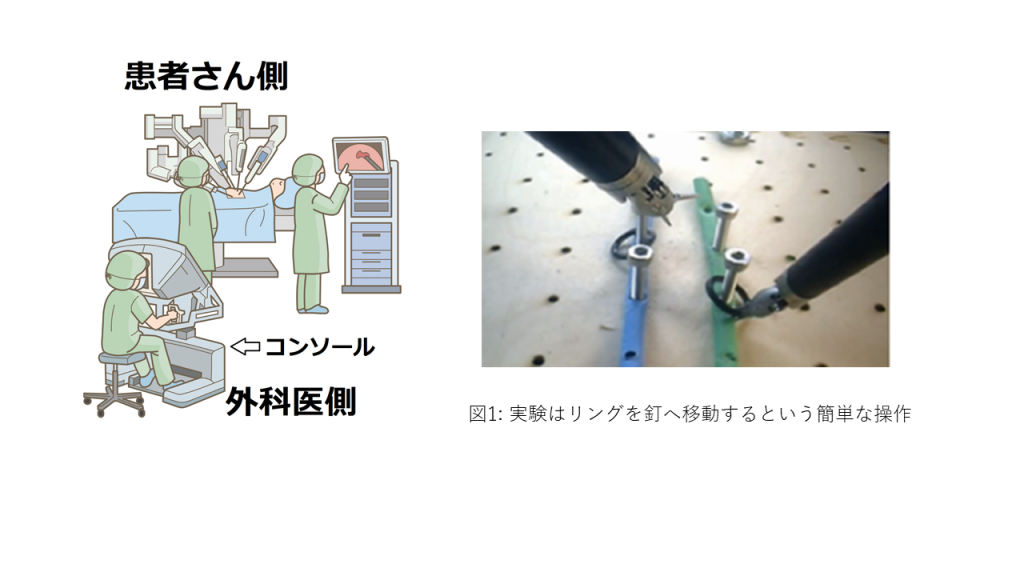
このラボは全米でも数少ないダ・ヴィンチのコンソール内をカスタムして研究できるラボで、プログラミングでダ・ヴィンチを改造して行いました。
ダ・ヴィンチは外科医がコントロールできるコンソールから患者さん側のロボットアームを操作して手術を行います。
基本的には同じ手術室内で行っているので問題ないのですが、遠く離れた場所において手術を行ういわゆる遠隔手術の場合、患者さん側のロボットアームに取り付けてあるカメラから外科医側に送られる画像の遅延やコントロール側からロボットアーム側への指令の遅延が問題となります。
実際に約20年前にニューヨークにいる外科医がフランスにいる患者の手術(腹腔鏡下胆嚢摘出術)を遠隔操作で行い、世界に衝撃を与えました(Nature 2001; 413: 379–380)が、実際にこの手術では平均155ミリ秒の遅延を認めていました。
我々の研究では大体500ミリ秒(0.5秒)の遅延で操作ミスが増える傾向にありました。
実際に私もやってみてとてもこの遅延下では操作は難しいと感じました。
そこで、これら操作ミスを少なくする為に、ロボットアームの動きを標準設定より小さくする(例:術者が1動かす時にロボットアームが0.5しか動かない)ことでミスを減らせないかというのを検討して、実際に操作ミスが減った、という研究結果となりました。
実際のダ・ヴィンチでもこの設定が可能ですが、手動なので、遠隔手術を行う場合、自動制御でこの設定ができるようになれば操作ミスはもっと減るのではないかという事が今後期待されます。
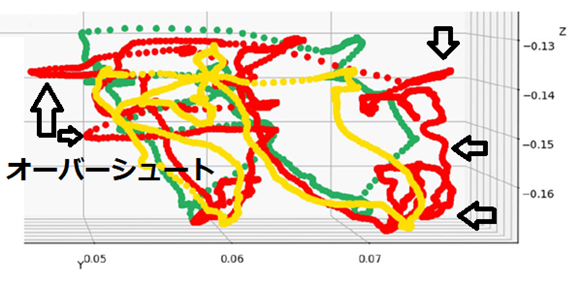
下記の動きの軌跡をみても、遅延のない操作(緑)に対し0.75秒遅延のある操作(赤)でオーバーシュートが確認できます。
ロボットアームの動きを小さくした操作(黄)は緑の標準操作と似ている動きになっています。
ちょっと難しい話になってしまったかもしれませんが、SF映画のように日本の腕のよい外科医が遠隔地にいる患者さんに対して手術ミスなくできるような未来をちょっと想像したくなるような研究でした。
5G通信の登場で遅延の心配はなくなるものの、電波の障害などで遅延は起こる可能性はあり、遅延が起きた時に我々の研究結果が参考になれば良いなと思います。
さて、肝心の変形性関節症患者さん用のロボット装具については…。つづきはカウンセリングにて。
当院では変形性膝関節症などに対して幹細胞治療を行っております。
無料カウンセリングを行っておりますので、お困りの方はお気軽にお問い合わせください。
最新のお知らせ
- 2026/02/26
- 幹細胞の点滴治療について
- 2026/02/19
- 佐藤先生に聞いてみよう股関節手術とロボット支援手術
- 2026/01/28
- 【無料セミナーのご案内】リハビリ×再生医療で支える「動ける未来」―膝編―
- 2026/01/26
- レントゲン検査・CT検査・MRI検査の違い
- 2026/01/13
- 杉谷先生に聞いてみよう「からだの基礎知識」― 筋肉・骨・関節・痛み・膝の構造について ―


